 |
 |
“БЙГЛ РкРВСжЧр МіСиРК ОЦСї ЗЙКЇ1~2 ДмАш”
ЂКРкРВСжЧр ГѓБтАш РћПыБтМњ
ММАшРЮБИРЧ СѕАЁЗЮ НФЗЎРлЙАРЧ СѕЛъРК СпПфЧб ШЕЮАЁ ЕЧАэ РжДй. РЬИІ ЧиАсЧЯБт РЇЧи РкРВСжЧр Йз РкРВРлОї БтМњРЬ СпПфЧЯАд РЮНФЕЧАэ РжРИИч, ДыКЮКаРЧ ГѓБтАш СІСЖЛчЕщРЬ РкРВСжЧр Йз РкРВРлОї БтМњАГЙпРЛ ПРЗЁ РќКЮХЭ УпСјЧиПРАэ РжДй. СИЕ№Ою, CNH, БИКИДй Ею МБСјЛчЕщРК ЗЙКЇ3(ПюРќРкДТ ХОНТЧЯАэ РжРИГЊ Л§МКЕШ АцЗЮПЁ ЕћЖѓ РкРВСжЧр Йз РлОїРЬ АЁДЩЧб ЗЙКЇ) МіСиРЧ СІЧАЕщРЬ ОчЛъРЬ СјЧрСпПЁ РжРИИч, БЙГЛ ГѓБтАш СІСЖЛчЕщРК РЬКИДйДТ ГЗРК ЗЙКЇ1~2 МіСиРЧ СІЧАРЛ ОчЛъ СпПЁ РжДй. ГѓОїПЁМ ГѓБтАшРЧ ПЊЧвРЬ АцПю, РЬОг, МіШЎ Ею СЄЧиСј РлОїРЛ МіЧрЧЯДј БтАшРЧ ПЊЧвПЁМ РкРВСжЧр БтМњРЬ СЂИёЕШ ЕЅРЬХЭИІ МіС§ЧЯДТ МОМРЧ ПЊЧвАњ УГЙцРЛ НЧЧрЧЯДТ ПЂУђПЁРЬХЭРЧ ПЊЧвЗЮ КЏШЕЧАэ РжДй.
РЬЗЏЧб РкРВСжЧр Йз РкРВРлОї БтМњРК Л§МКЛъЧтЛѓАњ ГыЕПЗТР§АЈРЬЖѓДТ РЬНДРЧ ЧиАсЛгИИ ОЦДЯЖѓ ЕЅРЬХЭ БтЙнРЧ СЄЙаГѓОїРИЗЮРЧ СјШИІ ХыЧи ГѓОїЛ§ЛъМКРЛ СѕАЁНУХААэ СіМг АЁДЩЧб ЛъОїРИЗЮ ЙпРќНУХАДТ СпПфЧб БтМњРЬДй.
ЁтRTK-GNSS Йз IMUИІ ХыЧб СЄЙаУјРЇ БтМњ
ГѓБтАшДТ РкЕПТїПЭ ДоИЎ АэСЄЙа СіЕЕ ЕюРЧ РЮЧСЖѓАЁ БИУрЕЧСі ОЪОЦ РкРВСжЧр Йз РкРВРлОїРЛ БИЧіЧЯБт РЇЧи СЄЙаУјРЇ БтМњРЬ АЁРх СпПфЧб ЧйНЩБтМњРЬЖѓАэ Чв Мі РжДй. АЁРх БтКЛРћРЮ GNSSИ№ЕтРЧ АцПь РкРВСжЧрПЁ ПюПыЧв СЄЕЕРЧ СЄЙаЕЕИІ ШЎКИЧв Мі ОјБт ЖЇЙЎПЁ D-GPS, RTK, PPP Ею ИЙРК КИСЄБтМњЕщРЬ АГЙпЕЦАэ, ГѓРлОїПЁ ШАПыАЁДЩЧб СЄЙаЕЕАЁ ГЊПРДТ RTK КИСЄРЛ СжЗЮ ЛчПыЧЯАэ РжДй.
RTK БтМњРК GPS РЇМКПЁМ ЙпНХЧЯДТ НХШЃИІ МіНХЧЯДТ БтСіБЙАњ РЬЕПБЙ АЃРЧ АХИЎИІ УјСЄЧи РЇФЁИІ ЦФОЧЧЯДТ БтМњРЬДй. RTKДТ РЬЗЏЧб ПРТїИІ 1~2ЇЏБюСі СйРЯ Мі РжДТ БтМњЗЮ, НЧНУАЃ РЬЕПУјРЇЖѓДТ АГГфРИЗЮ СЄЙаЧб РЇФЁСЄКИИІ АЁСіАэ РжДТ БтСиБЙРЧ ЙнМлЦФ РЇЛѓПЁ ДыЧб КИСЄФЁИІ РЬПыЧи РЬЕПБЙПЁМ НЧНУАЃРИЗЮ 1~2ЇЏ СЄШЎЧб УјРЇ АсАњИІ ОђДТ РЯЗУРЧ УјЗЎАњСЄРЛ ИЛЧбДй.
ЧЯСіИИ GNSSДТ РЇМКРЬ МіНХЕЧСі ОЪДТ РНПЕСіПЊРЬГЊ КИАњРхЕю НЧГЛПЁМДТ МіНХРЬ КвАЁДЩЧЯБт ЖЇЙЎПЁ ПЯРќ ЙЋРЮШИІ РЇЧиМДТ IMUИІ РЬПыЧб УпУјЧзЙ§(Dead reckoning) РћПыЕЕ ЧЪПфЧЯДй.
ЁтАцЗЮЛ§МК Йз УпСОБтМњ
ГѓСіДТ ГѓБтАшАЁ СжЧр Йз РлОїРЛ ЧиОп Чв АцЗЮАЁ СЄЧиСіСі ОЪРК РЯЙнРћРЮ АГШАСіЗЮ РкРВСжЧр Йз РлОїРЛ РЇЧиМДТ ПьМБ ‘ЧЪСі/АцСі’РЧ ЙќРЇМГСЄ ГЛПЁМ ‘РкРВСжЧр/РлОї’РЛ МіЧрЧв АцЗЮИІ Л§МКЧЯАэ Л§МКЕШ АцЗЮИІ ЕћЖѓ ГѓБтАшАЁ РкРВРлОїРЬ АЁДЩЧЯЕЕЗЯ ТїЗЎРЛ СІОюЧиОп ЧЯДТ АЭРЬ АцЗЮЛ§МК Йз УпСОБтМњРЬДй.
РкРВСжЧр АцЗЮЛ§МК БтМњРК ГѓРлОїПЁ ЕћИЅ ЧЪСі ГЛ УжРћАцЗЮИІ РкЕПРИЗЮ Л§МКЧЯЕЕЗЯ ЧЯДТ БтМњРЬДй. РЬЖЇ АцЗЮЛ§МК БтМњРЧ ПЯМКЕЕДТ МіРлОї ДыКё Р§ДыРћРЮ РлОїАХИЎ, ИщРћ, НУАЃ ЕюРЛ УжМвШ Чв Мі РжДТСі, РЬПЁ ЕћЖѓ ОѓИЖГЊ АцСІРћ ШПАњЗЮ ГЊХИГЊДТСіИІ ЦЧДмЧбДй. ПЙИІ ЕщОю РлОїНУАЃ ДмУр, ПЌЗсМвКёЗЎ Р§АЈ ЕюРЬ РжДй. ЖЧЧб, РкРВСжЧр ГѓБтАшАЁ ОѓИЖГЊ ИЙРК ГѓРлОїПЁ ДыРРЧЯДТСіЕЕ АцЗЮЛ§МКБтМњПЁ ЕћЖѓ СТПьЕШДй.
АцЗЮУпСОРК Л§МКЕШ АцЗЮПЁ ЕћЖѓ ТїЗЎРЬ УжРћРИЗЮ ‘СжЧр/СЖЧт’ЧЯДТ БтМњРЬИч, АцЗЮПЁ ЕћИЅ ТїЗЎСІОю, РлОїСІОюЕЕ ЦїЧдЕШДй. АцЗЮУпСО БтМњМіСи Йз УжРћШПЁ ЕћЖѓ РкРВСжЧр ГѓБтАшРЧ АцЗЮУпСО ПРТї Йз РлОї ПРТїАЁ АсСЄЕШДй.
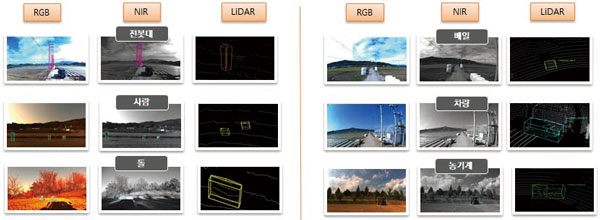
ЁтAI ШЏАцРЮНФ БтМњ
АцЗЮ УпСОБтМњАњ АцЗЮЛ§МК БтМњРЬ Level3 МіСиРЧ РкРВСжЧрРЛ БИЧіЧЯБт РЇЧб БтЙнБтМњЗЮ АГЙпЕЦДйИщ, ГѓБтАш РкРВСжЧрРЬ Level4 МіСиРЧ ЙЋРЮШАЁ ЕЧБт РЇЧиМДТ ШЏАцРЮНФ БтМњРЬ ЧЪМіРћРЬДй. ФЋИоЖѓ Йз Lidar, Radar Ею МОМРЖЧеРЛ ХыЧб КёСЏБтЙн ЕЅРЬХЭ БИУр, БзИЎАэ БИУрЕШ ЕЅРЬХЭ ЧаНРРЛ ХыЧб AIИ№ЕЈ АГЙпРЬ ЧЪПфЧЯДй. ЧіРчДТ ПЕЛѓ Йз Lidar ЕЅРЬХЭИІ ШАПыЧб РхОжЙА РЮСі И№ЕЈ, РлОїСі АцАш РЮНФ И№ЕЈРЬ ДыЧЅРћРИЗЮ АГЙп Йз ШАПыЕЧАэ РжСіИИ ЧтШФПЁДТ РлЙАЛ§РА КаМЎ, МіШЎЗЎ КаМЎ ЕюРЧ СЄЙаГѓОї AIКаМЎРЛ ХыЧи НЧЧіЕЩ ПЙСЄРЬДй. Дѕ ГЊОЦАЁ ‘ЦЧДм/СІОю’РЧ ПЕПЊБюСі AIАЁ АГРдЧи УжРћРЧ РлОїАшШЙРЛ РлМКЧи УпУЕЧЯАэ, КёМїЗУРкАЁ ГѓРлОїРЛ ЧЯДѕЖѓАэ РќЙЎАЁ МіСиРЧ РлОїРЬ АЁДЩЧЯАд AIАЁ КИСЖЧЯДТ БтМњЕщРЬ АГЙпЕЩ АЭРИЗЮ БтДыЧЯАэ РжДй.
 |
| ЙЋРЮ РкРВРлОї АЁДЩЧб ЦЎЗЂХЭ ПЙНУ |
 |
| ГѓРлОїСі СжКЏРЧ ДйОчЧб АДУМ И№ЕЈ |
 |
| ЧиПм СжПф МБСјЛч РкРВСжЧр Йз УГЙц МжЗчМЧ АГЙп ЧіШВ |
 |
| Exact shot БИЧі ЦФСО БтМњ Йз ИоФЋДЯСђ |
 |
| ФЋИоЖѓ БтЙнРЧ РтУЪ РЮНФ AI БтМњРЛ ХОРчЧб Sprayer |
 |
| РкРВРлОї БтМњ РћПы РќШФ КёБГ ПЙНУ |
ЂКРкРВСжЧр ГѓБтАш ЛѓПыШ ЛчЗЪ
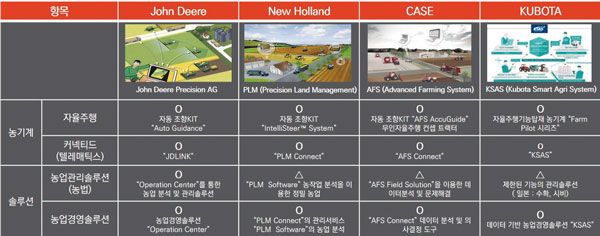
СИЕ№Ою, CNH, БИКИДй Ею ЧиПм СжПф МБСјЛчЕщРК РкРВРлОї Йз ФПГиЦМЕх БтМњРЛ ХыЧи Level3 МіСиРЧ РкРВРлОїРЬ АЁДЩЧб ГѓБтАшИІ ОчЛъ КИБо СпПЁ РжРИИч, ГЊОЦАЁ AI БтМњАњ СЄЙаГѓОї БтМњРЛ АсЧеЧи Level4(ЙЋРЮШ ГѓБтАш) МіСиРЧ СІЧААГЙпПЁ С§СпЧЯАэ РжДй.
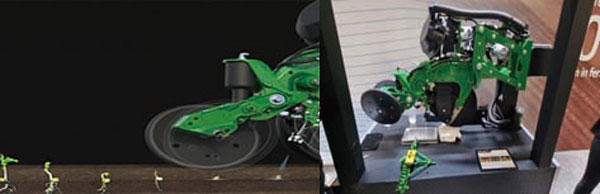
2023Гт CESИІ ХыЧи СИЕ№ОюДТ РкРВСжЧр БтМњРЛ ГбОю AI Йз СЄЙаГѓОїРЛ АсЧеЧи АюЙАРЧ Л§ЛъЗЎРЛ БиДыШЧЯДТ ДйОчЧб МжЗчМЧЕщРЛ АјАГЧпДй.
‘Exact Shot’РК КёСЏМОМПЭ ЗЮКП АјЧаБтМњРЛ ШАПыЧи ЦФСОЕШ ОООбРЬ РжДТ АїПЁИИ ЧЪПфЧб ОчРЧ КёЗсИІ ЛьЦїЧЯДТ БтМњРЛ РћПыЧпРИИч, Sprayer(ОрСІЛьЦїБт)ПЁДТ 36ДыРЧ ФЋИоЖѓ Ею КёСЏМОМ, AIБтМњ БзИЎАэ RTK-GPS ЕюРЧ БтМњРЛ РћПыЧи РтУЪИІ НФКАЧи РтУЪАЁ СИРчЧЯДТ ПЕПЊПЁИИ ОрСІИІ ЛьЦїЧЯДТ ‘See & Spray’ БтМњРЛ РћПыЧи СІУЪСІ ЛчПыРЛ 70% РЬЛѓ АЈМвНУФб КёПыР§АЈ Йз ШЏАцПРПАРЛ СйРЬДТ ESG НЧЧіРЛ РЇЧб ДйОчЧб БтМњЕщРЛ АГЙпЧЯАэ РжДй.
БЙГЛ ГѓБтАш СІСЖЛчРЮ ЂпДыЕП, TYM, LSПЅЦЎЗаПЁМЕЕ РкРВСжЧр ГѓБтАш ЛѓПыШИІ РЇЧи ПЌБИАГЙпРЛ СјЧр СпПЁ РжДй. ДыЕПРЧ АцПь, 2019Гт 3ПљПЁ РЬОгБтПЁМ СїСј РкРВСжЧр БтМњРЛ РћПыЧб УЪБтИ№ЕЈРЛ УтНУЧбЙй РжДй. РЬИІ РЇЧи RTK-GPS АГЙп Йз РћПы, СїСјРкРВСжЧр СІОюБт АГЙп Йз РћПы, РќЕПНФ СЖЧтНУНКХл(И№ХЭ&РЮЙіХЭ) АГЙп Йз РћПы ЕюРЧ БтМњРЬ ЛчПыЕЦДй.
РкРВСжЧрРЬ ОЦДб РЯЙн РЬОгБтПЭ КёБГНУ РлОїРЛ ПјШАШї СјЧрЧЯБт РЇЧиМДТ ПюРќРкПЭ И№ КИУц Йз РЬОгРлОї ЛѓХТИІ И№ДЯХЭИЕЧЯДТ РлОїРк 2РЮРЬ РлОїРЛ ЧЯДТ РЯЙн РЬОгБтПЁ КёЧи 1РЮРИЗЮ РлОїРЬ АЁДЩЧЯАХГЊ, РлОї СпДмОјРЬ РлОїРЬ АЁДЩЧЯДйДТ РхСЁРЬ РжОю СЁСјРћРИЗЮ НУРхСЁРЏРВРЛ ГєПЉАЁАэ РжДй.
ЦЎЗЂХЭДТ ЂпДыЕППЁМ 2019Гт 5ПљПЁ СїСјРкРВСжЧр ЦЎЗЂХЭИІ УтНУЧпРИИч, 2023ГтПЁДТ ДыЕП, TYM, LSПЅЦЎЗа 3ЛчАЁ И№ЕЮ МБШИИІ ЦїЧдЧб ЗЙКЇ3 МіСиРЧ РкРВСжЧр ЦЎЗЂХЭИІ ОчЛъЧв ПЙСЄРЬДй.
РкРВРлОї БтМњРЬ СЂИёЕШ ЦЎЗЂХЭИІ ЛчПыЧи РЬЖћ Йз ЧЧКЙРлОїЧЯДТ АцПь, РЯЙн ЦЎЗЂХЭАЁ МіЧрЧЯДТ РлОїПЁ КёЧи СЄБГЧб РлОїРЬ АЁДЩЧЯБт ЖЇЙЎПЁ Л§МКАЁДЩЧб АэЖћМіАЁ 10~20%АЁЗЎ СѕАЁЕХ Л§ЛъЗЎ СѕДыИІ ХыЧб АцСІРћРЮ ШПАњЛгИИ ОЦДЯЖѓ РлОїРк ЦэРЧМКРЛ СІАјЧбДй.
ЧіРч ЧиПм МБСјЛч Йз БЙГЛ ГѓБтАш СІСЖ 3Лч И№ЕЮ ЙЋРЮШИІ ИёЧЅЗЮ МБЧрАГЙпРЬ СјЧрЕЧАэ РжРИИч, ЙЋРЮШ БтМњАњ ГѓОїЕЅРЬХЭИІ БтЙнРИЗЮ ГѓОїЛ§ЛъМКРЛ БиДыШЧЯДТ СЄЙаГѓОї ШЄРК НКИЖЦЎЦФЙжРИЗЮ ЙЬЗЁИІ СиКёЧЯАэ РжДй. РЬЗЏЧб БтМњРЛ ХыЧи ГѓОїРЬ СіМгАЁДЩЧб ЛъОїРИЗЮ ЙпРќЧи АЅ Мі РжЕЕЗЯ ГѓОї Йз ГѓБтАш ЛъОїПЁ ДыЧб ВїРгОјДТ ХѕРкПЭ ГыЗТРЬ ЧЪПфЧЯДй.
ГѓУрЛъБтАшНХЙЎ webmaster@alnews.co.kr
<РњРлБЧРк © ГѓУрЛъБтАшНХЙЎ, ЙЋДм РќРч Йз РчЙшЦї БнСі>





