 |
 |
“НУЧшЦђАЁ ‘ARPA Protocol’ БЙСІЧЅСи СІСЄёщ”
ЂКРкРВСжЧр ГѓБтАш БтМњ Йз БтСи
АэМКДЩМОМ Йз СЄЙаСІОюБтМњРЧ АэЕЕШПЭ ДѕКвОю RTK, DGPS Ею GNSS(Global Navigation Satellite System) БтМњРЧ ЛѓПыШДТ РкРВСжЧр ГѓБтАш АГЙп·КИБоПЁ СпУпПЊЧвРЛ ДуДчЧи ПдДй. ЧіРч ЧиДч БтМњРЛ ЧЪЕЮЗЮ РкРВСїСј Йз РкРВМБШИ, МБШИ АЃ РлОїБт СІОюАЁ АЁДЩЧб РкРВСжЧр ГѓБтАшАЁ РЯКЮ ЛѓПыШЕЧОю КИБо СпПЁ РжДй.
ГѓРлОїРЧ АцПь, РкРВСжЧр РлОї АЃ СЄШЎЧб СїСј СжЧрРЬ ГѓОїЛ§ЛъМКПЁ СіДыЧб ПЕЧтРЛ ЙЬФЁАд ЕШДй. ЦЏШї, РЬОгБтПЭ ААРЬ РЯСЄЧЯАэ СЄЙаЧб РлОїАЃАнРЛ ПфБИЧЯДТ ГѓБтАшДТ СїСј СЄШЎЕЕАЁ УжСО РлЙАРЧ Л§ЛъМКПЁ ПЕЧтРЛ ГЂФЁБт ЖЇЙЎПЁ РкРВСїСј АцЗЮИІ СЖБнРЬЖѓЕЕ ЙўОюГЊАд ЕЧИщ РкРВСжЧр БтДЩРЬ КвЧЪПфЧиСјДй. ЕћЖѓМ СЄЙаЧб СїСјМК ШЎКИИІ РЇЧи БЙГЛАГЙп РкРВСжЧр ГѓБтАшДТ ПРТїЙќРЇ 2~4ЇЏ МіСиРЧ АэМКДЩ RTK-DGPSИІ ХОРчЧи КИБо СпПЁ РжДй.
ЧіРч РЬЗЏЧб БтМњМіСи Йз МКДЩПфБИПЁ ЕћЖѓ БЙГЛ НУЧшЦђАЁ СІЕЕДТ РкРВСжЧр ГѓБтАшРЧ ИёЧЅАцЗЮ ДыКё НЧСІ РкРВСжЧр АцЗЮПЁ ДыЧб ПРТї СЄЙаЕЕАЁ ЦђАЁЧзИёРИЗЮ РћПыЕХ РжДй.
ЂКЙЋРЮ・СіДЩЧќ ГѓБтАш РћПыБтМњ
РкРВСжЧр ГѓБтАш БтМњРЧ СіЧтСЁРК ПЕГѓСжРЧ ГыЕПЗТ МвПфИІ УжМвШЧЯАэ, РкЕПРИЗЮ СЄЙаЧб ГѓРлОїРЛ МіЧрЧдРИЗЮМ ПЕГѓМіРЭРЛ БиДыШЧЯДТ АЭРЬДй. РЬЗЏЧб БтМњСіЧтСЁ ГЁПЁДТ ГѓБтАшРЧ СЖСОРк ОјРЬ СЄЙаРлОїРЛ МіЧрЧЯДТ ‘ЙЋРЮСжЧрБтМњ’Ањ ГѓБтАшПЁ РхТјЕШ АэМКДЩМОМЗЮКЮХЭ МіС§ЕШ СЄКИИІ РЮСіЧи ЛѓШВРЛ ЦЧДмЧЯАэ ГѓБтАшИІ СІОюЧЯДТ ‘РЮАјСіДЩ’РЬ РкИЎЧЯАэ РжДй.
РЬЗЏЧб ЙЋРЮ·СіДЩЧќ ГѓБтАшПЁ РћПыЕШ БтМњЕщРЛ АэЗСЧи OECD ГѓИВОїПы ЦЎЗЂХЭ НУЧшЦђАЁ КаОпРЧ TWG(Technical Working Group)ПЁМДТ ЙЋРЮСжЧрБтМњАњ СЄКИМіС§МОМЗЮ МіС§ЕШ ЕЅРЬХЭПЁ ДыЧб ЛѓШВРЮСі, ЦЧДм, СІОюАЁ АЁДЩЧб ЦЎЗЂХЭИІ ‘ЗЮКПЦЎЗЂХЭ’ЗЮ СЄРЧЧЯАэ РжДй.
 |
| ISO/DIS 18497-4: ARPA 1 НУЧшЦђАЁ ЙцЙ§ |
 |
| РхОжЙА РЮНФШИЧЧИІ РЇЧб ‘ARPA 1’ НУЧшЦђАЁ НУПЌИ№НР |
 |
| РЮИэЛчАэ ШИЧЧИІ РЇЧб ‘ARPA 4’ НУЧшЦђАЁ НУПЌИ№НР |
ЂКЧиПм ЗЮКПЦЎЗЂХЭ НУЧшЦђАЁ
ЗЮКПЦЎЗЂХЭПЁ ДыЧб НУЧшЙцЙ§РК ЧСЖћНК БЙИГГѓИВУрЛъНФЧАШЏАцПЌБИМв(INRAE: Institut National de Recherche pour l'Agriculture, l'Alimentation et l'Environnement)ПЁМ ПЌБИЧЯАэ РжРИИч, ПьИЎГЊЖѓИІ ЦїЧдЧб OECD АЁРдБЙРЧ ГѓИВОїПы ЦЎЗЂХЭ НУЧшЦђАЁ TWGПЭ АјРЏЕЧАэ РжДй. INRAEПЁМДТ ЗЮКПЦЎЗЂХЭ НУЧшЦђАЁ ЙцЙ§РЛ ‘ARPA Protocol(Agricultural Robot Performance Assessment Protocol)’РЬЖѓ ИэИэЧи Уб 4АГРЧ НУЧшРЛ СІНУЧЯАэ РжРИИч, 3АГРЧ НУЧшЙцЙ§РК РЬЙЬ БЙСІЧЅСи(ISO)РИЗЮ СІСЄЧЯБт РЇЧи ЧіРч БЙСІЧЅСи УЪОШРЛ ЙшЦї(ISO/DIS 18497-4)ЧЯАэ РЇПјШИ АЫХфДмАшИІ АХФЁАэ РжДй.
ЁтARPA 1 : РхОжЙА РЮНФ Йз ШИЧЧ
‘ARPA 1’РК РхОжЙА АЈСіПЁ АќЧб НУЧшРЬДй. ЗЮКПЦЎЗЂХЭ РкРВСжЧр АцЗЮ ГЛ ГѕПЉСј РхОжЙАРЧ РЇФЁПЁ ЕћЖѓ УцЕЙПЉКЮИІ НКНКЗЮ РЮСіЧи, УцЕЙРЬ ОјДйАэ ЦЧДмЕЧИщ СіМгСжЧр ЖЧДТ УцЕЙРЬ ПЙЛѓЕЧИщ АцКИРН ЙпЛ§ Йз СЄСі ЕюРЧ ЛѓШВЦЧДм·СІОюИІ ПфБИЧЯАэ РжДй. РкРВСжЧр АцЗЮРЧ Цј(КЮТј РлОїБтИІ ЦїЧдЧб ЗЮКПЦЎЗЂХЭРЧ ТїЦј) ГЛПЁ РхОжЙАРЬ АЈСіЕШ АцПь УцЕЙПЙЙцРЛ РЇЧб АцКИРНРЛ ЙпЛ§НУХААэ УцЕЙ РќПЁ ЗЮКПЦЎЗЂХЭАЁ СЄСіЕХОп ЧбДй. ДйИИ, РхОжЙАРЧ РЇФЁАЁ РкРВСжЧр АцЗЮ ЦјРЛ ЙўОюГ АїПЁ РЇФЁ(РЬАнАХИЎ: ЗЮКПЦЎЗЂХЭ РкРВСжЧр АцЗЮПРТїРЧ 3Йш)Чб АцПь ЗЮКПЦЎЗЂХЭДТ СіМгЧи РкРВСжЧр АцЗЮИІ СжЧрЧв Мі РжЕЕЗЯ БдСЄЧЯАэ РжРИГЊ РхОжЙААњРЧ УцЕЙРК ОјОюОп ЧбДй.
ЁтARPA 2 : ПОЧЧб ШЏАц Мг РхОжЙА РЮНФ
‘ARPA 2’ДТ АПь, ОШАГ Ею ПОЧЧб ШЏАц МгПЁМРЧ РхОжЙА РЮНФПЉКЮИІ ШЎРЮЧЯДТ НУЧшРЬЖѓАэ КМ Мі РжДй. ГѓБтАшДТ ЧзЛѓ Шы, ЙА Ею ПОЧЧб ШЏАцПЁМ РлОїРЬ РЬЗяСќПЁ ЕћЖѓ ЛчПыШЏАц ЦЏМКРЛ АэЗСЧи КЛ ARPA 2АЁ НУЧшЧзИёРИЗЮ АэЗСЕЧАэ РжДй.
ЧиДч НУЧшРК УЈЙіПЁМ МіЧрЧв АЭРЛ ПфБИЧЯАэ РжРИИч, АПь, ОШАГЗЮ РЮЧб АЁНУМКРК 10m ЙЬИИРЧ СЖАЧРИЗЮ МіЧрЕХОп ЧбДй. ОШАГРдАцРК 1ЇПЁМ 10ЇЛчРЬ ПЉОп ЧЯИч, КјЙцПяРЧ ХЉБтДТ 0.2ЇЎПЁМ 25ЇЎ РЬГЛЗЮ БдСЄЕХ РжДй. ‘ARPA 2’ДТ ЗЮКПЦЎЗЂХЭ РќУМИІ ДыЛѓРИЗЮ НУЧшЧв ЧЪПфДТ ОјРИИч, РхОжЙА АЈСіНУНКХлИИРЛ НЧСІ ЗЮКПЦЎЗЂХЭПЁ РхТјЕШ РЇФЁПЭ ЕПРЯЧЯАд БИМКЧи НУЧшЧв Мі РжДй.
НУЧш ПфБИСЖАЧРК АПь, ОШАГЗЮ РЮЧб ПОЧШЏАц МгПЁМ ЗЮКПЦЎЗЂХЭ РќЙцРИЗЮ СІСЖЛчАЁ МГСЄЧб АцАэБИПЊ, РЇЧшБИПЊ АцАшПЁМ РхОжЙАРЬ СЄЛѓРћРИЗЮ АЈСіЕХОп ЧбДй.
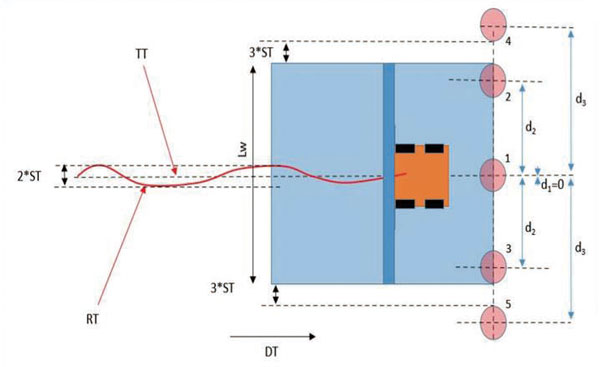
ЁтARPA 3 : ЙЋРЮРкРВСжЧр Geofencing(Geographic + Fencing)
ЧиПм МБСјЛчПЁМ ПЌБИ·АГЙп СпРЮ ЗЮКПЦЎЗЂХЭ ДйМіАЁ ПюРќ·СЖСОМЎРЬ ОјДТ ЧќХТИІ МБКИРЬАэ РжДй. БзЗЏГЊ УцЕЙЛчАэПЁ ДыЧб ДыУГИІ ЗЮКПЦЎЗЂХЭПЁАд РЧСИЧиОп ЧЯДТ ИЎНКХЉЕЕ АјСИЧбДй. ЕћЖѓМ ЗЮКПЦЎЗЂХЭДТ РкРВСжЧрЧЯДТ РлОїБИШЙРЬ СЄРЧЕХ РжОюОп ЧЯАэ, ЛчЖїРЧ Л§ШААјАЃАњ КаИЎЕХ РкРВСжЧр АЃ СЄРЧЕШ РлОїБИШЙРЛ ЙўОюГЊСі ИјЧЯЕЕЗЯ ЧЯДТ ЙцОШРЛ АБИЧЯАэ РжДй.
‘ARPA 3’ДТ БдСЄЕШ ЧќЛѓ(Geographic)РЧ РлОїБИШЙ(Fencing)РЛ МГСЄЧЯАэ, Бз БИШЙ ГЛПЁМ ХыЛѓРЧ РкРВРлОї, РлОїБИШЙ АцАшМБ РлОї, АцАшМБРЛ АЁЗЮСіИЃДТ РЇФЁРЧ РлОїИэЗЩРЛ СіНУЧЯПДРЛ ЖЇ ЗЮКПЦЎЗЂХЭРЧ ПђСїРгРЛ АќТћЧЯИч, И№Еч РлОїИэЗЩПЁМ ЗЮКПЦЎЗЂХЭДТ РлОїБИШЙРЛ ЙўОюГЊСі ОЪОЦОп ЧбДй.
Ёт ARPA 4 : ГѓРлЙА Л§РАШЏАцПЁМРЧ РЮИэЛчАэ ШИЧЧ
ГѓРлОїРЛ МіЧрЧЯДТ ГѓБтАшРЧ АцПь РчЙш СпРЮ РлЙА ЛчРЬ ЖЧДТ РлЙА РЇИІ СжЧрЧЯАХГЊ НЩСіОю РлЙАРЛ КЃАэ АЁОп ЧЯДТ АцПьАЁ РжДй. ЕћЖѓМ РќЙцПЁ АЈСіЕШ ЧЧЛчУМАЁ РхОжЙА, РчЙшРлЙА, ЛчЖї Ею ЙЋОљРЬГФПЁ ЕћЖѓ ДыУГЙцЙ§РЬ ЛѓРЬЧиОп ЧбДй. ‘ARPA 4’ДТ ЧіРч ISO ЧЅСи МГСЄ Рќ OECD ГѓИВОїПы ЦЎЗЂХЭ КаОп TWGПЁ ПьМБ АјРЏ СпРЮ НУЧшЙцЙ§РИЗЮ, РлЙАРЬ Л§РА СпРЮ ШЏАцПЁМ ЛчЖїРЛ СЄШЎШї РЮСіЧЯАэ ЛчАэИІ ШИЧЧЧЯДТ ДЩЗТРЛ ШЎРЮЧЯБт РЇЧб НУЧшРЬДй.
НУЧшПЁДТ ПТЕЕ, ХЉБтАЁ БдСЄЕШ ЛчЖї ЧќЛѓРЧ ДѕЙЬАЁ ШАПыЕЩ ПЙСЄРЬИч, РлЙАРЧ Л§РАСЖАЧ, ДѕЙЬРЧ РЇФЁ ЕюПЁ АќЧб ЛчЧзРЛ АЫХф СпПЁ РжДй. НУЧш ПфБИСЖАЧРК НУЧш Сп ГѓБтАшПЭ ДѕЙЬРЧ УцЕЙРЬ ОјОюОп ЧЯИч, ЛчЖї РЮНФ НУ СІСЖЛчАЁ СІНУЧб ЙцНФРЧ ЛчАэПЙЙц ЕПРлРЬ МіЧрЕХОп ЧбДй.
ЂКНУЧшЦђАЁИІ ХыЧб НХЗкПЭ РЮСЄ
ГѓБтАш НУЧшЦђАЁДТ ГѓБтАш БИИХРкПЁАд СІСЖЛчАЁ АГЙпЧб ГѓБтАшПЁ ДыЧб НХЗкАЈРЛ ЧќМКЧи СжДТ АЭПЁ ХЋ КёСпРЛ ЕЮАэ РжДй. ЖЧЧб, УЗДмБтМњРЧ С§ОрУМЖѓ Чв Мі РжДТ СіДЩЧќ ГѓБтАшРЧ АцПь УЪБт ХѕРкКёПыРЬ РЯЙн ГѓБтАшКИДй ИЙРЬ МвПфЕЧДТ АЭРЬ ЛчНЧРЬДй. ЕћЖѓМ СіДЩЧќ ГѓБтАшАЁ ГѓАЁПЁ КИБо·ШЎЛъЕЧБт РЇЧиМДТ СіДЩЧќ ГѓБтАшРЧ Л§ЛъМК ЧтЛѓ, ПЕГѓ МвЕцСѕДы, ЦэИЎЧд ЕюРЧ ШПАњПЭ ОШРќМКПЁ ДыЧб НХЗкАЁ ЧЪПфЧЯДй. АэЕЕРЧ БтМњРЬ С§ОрЕШ СіДЩЧќ ГѓБтАшПЁ ДыЧб ОШРќМК ШЎКИИІ РЇЧи ЧиПм МБСјБЙРЧ ЦђАЁЙцЙ§РЛ АјРЏ·ЕЕРдЧЯАэ, ДйОчЧб ЛчПыШЏАц, ЛчПыСЖАЧПЁМ НЧСѕ ХзНКЦЎИІ МіЧрЧи ГѓБтАшРЧ ЧАСњРЛ КИПЯ·АГМБЧв Мі РжЕЕЗЯ РЮЧСЖѓИІ СЖМКЧЯДТ Ею ГѓОїРЮПЁАд СіДЩЧќ ГѓБтАшРЧ ШПАњИІ РЮСЄЙоБт РЇЧб ПЉСЄРЛ ЧдВВ Чв ПЙСЄРЬДй.
ГѓУрЛъБтАшНХЙЎ webmaster@alnews.co.kr
<РњРлБЧРк © ГѓУрЛъБтАшНХЙЎ, ЙЋДм РќРч Йз РчЙшЦї БнСі>





