 |
 |
“КИБоУЪБтПЁ СЄКЮБтАќ РЧЙЋАјБо ЧЪПфЧи”
ЂКГѓЛъОї КаОпРЧ ШЏАцКЏШ
УжБй ПЉЗЏ ЛъОїКаОпПЁМДТ 4ТїЛъОїЧѕИэ ЧйНЩБтМњРЮ РЮАјСіДЩ, ЗЮКП Йз КђЕЅРЬХЭ БтМњ ЕюАњ СЂИёЧб РкЕПШ, Е№СіХаШИІ ХыЧи СїИщЧб ЙЎСІИІ ЧиАсЧЯАэРк ЧЯДТ ПђСїРгРЬ КќИЃАд ШЎЛъЧЯАэ РжДй. ЦЏШї ГѓОїЧіРхПЁМДТ МОМПЭ ФФЧЛХЭ, ЗЮКПБтМњ ЕюРЛ СЂИёЧб СіДЩШ, ЙЋРЮШИІ ХыЧи РЮЗТГ ЧиМв, ГѓРлОї ЦэРЬМК СІАј Ею ЧіОШЙЎСІИІ ЧиАсЧЯАэ ГѓАЁРЧ МвЕцСѕДы Йз ГѓЛъЙАРЧ ОШСЄРћРЮ АјБоРЛ СіПјЧЯАэ РжДй. БзЛгИИ ОЦДЯЖѓ ГѓОрАњ КёЗсРЧ ЛчПыРЛ СйРЬБт РЇЧб СіДЩШПЭ ГЛПЌБтАќРЛ ДыНХЧв ГѓБтАш РќЕПШИІ ХыЧи ХКМвРњАЈ Ею ГѓОїШЏАц КЮДуРЛ СйРЬАэ ФЃШЏАц ГѓЛъЙАРЛ Л§Лъ, АјБоЧЯАэРк ЧЯДТ ЙцЧтРИЗЮ СјШЧЯАэ РжДй.
ЂКРкРВСжЧр БтМњРЧ РћПы
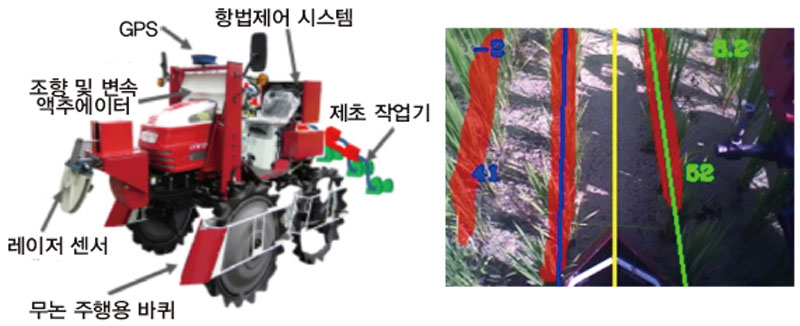
УЗДмГѓБтАшДТ БтСИРЧ ГѓБтАшПЁ ЗЮКП Ею ICT БтМњРЛ СЂИёЧи ЛчПыРкПЁАд ГѓРлОї ЦэРЬМКРЛ СІАјЧдРИЗЮНс ДѕПэ НБАэ ОШРќЧЯАд ГѓРлОїРЛ МіЧрЧв Мі РжЕЕЗЯ ЧиСиДй. ДыЧЅРћРЮ УЗДмГѓБтАш РћПыБтМњЗЮДТ РкРВСжЧр БтМњРЛ ВХРЛ Мі РжДй. РкРВСжЧр БтМњРК ГѓОїБтАш Сп ЛчПыКёСпРЬ АЁРх ГєАэ УЗДмШЕЧОю РжДТ ЦЎЗЂХЭИІ СпНЩРИЗЮ БтМњАГЙпРЬ РЬЗяСіАэ РжДй. ГѓРлОї НУ РкРВСжЧрРК РкЕПТїПЁ КёЧи РЏИЎЧб ЛчПыШЏАц СЖАЧРЛ АЁСіАэ РжДй. ЦЏШї ЦЎЗЂХЭ РлОїРЧ АцПь СжКЏ РхОжЙАРЬ РћАэ ДйОчЧб РкЕПТїАЁ РЬЕП Йз БГТїЧЯДТ ЕЕЗЮПЭДТ ДоИЎ ЛчАэРЇЧшРЬ РћРИИч РлОїМгЕЕАЁ 20ЇА/h ГЛПмРЧ РњМгРИЗЮ БтМњРћРЮ УјИщПЁМ СЂБйРЬ НЌПю РхСЁРЬ РжДй. УжБйПЁДТ АэСЄЙа РЇМКЧзЙ§НУНКХл(RTK-GNSS)ПЭ РќЕПЧќ ЧкЕщ ЕюРЛ ШАПыЧб РкРВСжЧр БтМњРЛ БтСИРЧ ЦЎЗЂХЭГЊ АќИЎБт Ею НТПыЧќ ГѓБтАшПЁ РхТјЧи РлОїРк ДыНХ ГѓАцСіИІ 10ЇЏ РЬГЛРЧ ПРТїЗЮ НКНКЗЮ СїСјСжЧрЧЯИщМ АцПю, СЄСі, ЦФСО ЕюРЧ ГѓРлОїРЛ ЕЕПЭСй Мі РжДй. ОїУМПЁМ АГЙпЧи ГѓАЁПЁ КИБоЕЧАэ РжДТ СїСјСжЧр РЬОгБтРЧ АцПьЕЕ 2РЮРЬ ЧЯДј И№ГЛБт РлОїРЛ 1РЮ РлОїРЬ АЁДЩЧЯАд ЧиСиДй.
ЂКГѓУЬСјШяУЛ РкРВСжЧр ГѓБтАш АГЙп ЛчЗЪ
ГѓУЬСјШяУЛПЁМЕЕ РкРВСжЧрАњ АсЧеЧб ДйОчЧб УЗДмГѓБтАшПЁ ДыЧб ПЌБИАГЙпРЬ РЬЗяСіАэ РжДй. РЬЙЬ 1999ГтПЁДТ АэСЄЙа GNSSПЭ ПЕЛѓ, РЮАјСіДЩ БтЙнРЧ РкРВСжЧр ЦЎЗЂХЭ БтМњРЛ АГЙпЧпДй. БтСИРЧ ГѓБтАшПЁ РхТјЧи ШАПыЧв Мі РжАэ, ГѓРлОїРкГЊ РхОжЙАРЛ РЮНФЧЯАэ ШИЧЧЧв Мі РжДТ БтМњБюСіЕЕ БИЧіЧпДй. ЧЯСіИИ ДчНУИИ ЧЯДѕЖѓЕЕ АэСЄЙа GNSS РхФЁРЧ АЁАнРЬ ГЪЙЋ ГєОЦ ЛъОїШБюСіДТ РЬЗяСіСі ОЪОвДй.
 |
| GPSПЭ ПЕЛѓБтЙн РкРВСжЧр ЦЎЗЂХЭ |
ЙЋГэ ШЏАцПЁМ РкРВСжЧрЧЯИщМ СІУЪРлОїРЛ МіЧрЧв ИёРћРИЗЮ КГѓЛчПы СІУЪ ЗЮКПЕЕ АГЙпЧпДй(2015). 2D ЗЙРЬРњ МОМИІ РЬПыЧи И№РЧ ПАњ СіИщРЧ ГєРЬТїИІ КёБГЧи И№ИІ ЙтСі ОЪАэ ±5ЇЏ РЬГЛРЧ ПРТїЗЮ РлЙА ПРЛ УпСОЧЯАэ, RTK GNSSИІ ШАПыЧи МБШИБИАЃРЛ РЮНФЧи ДйРН РлОї ПЗЮ СјРдЧв Мі РжДТ ЧйНЩБтМњРЛ АГЙпЧпДй. ЖЧЧб, РЮАјСіДЩ БтМњАњ СЂИёЧи ЧЯГЊРЧ ФЋИоЖѓЗЮ И№ПРЛ РЮНФ, УпСОЧв Мі РжДТ БтМњЕЕ АГЙпЧи АэАЁРЧ МОМИІ ДыУМЧв Мі РжДТ БтЙнБтМњРЛ ШЎКИЧпДй.
 |
| ГѓУЬСјШяУЛ АГЙп СІУЪ ЗЮКП(СТ)Ањ РЮАјСіДЩ ШАПы И№П РЮНФ РлЙА УпСО БтМњ(Пь) |
УжБйПЁДТ ПЕЛѓАњ РЮАјСіДЩ БтМњРЛ ШАПыЧи АцПюЧб АїАњ АцПюЧЯСі ОЪРК ЦїРхРЧ АцАшИІ РЮНФЧи РкРВРлОїРЛ МіЧрЧв Мі РжДТ ЦЎЗЂХЭ РкРВСжЧр БтМњРЛ АГЙпЧпДй(2020). ЖЅРЛ АцПюЧЯИщМ ЦЎЗЂХЭПЁ РхТјЕШ ПЕЛѓФЋИоЖѓЗЮ НЧНУАЃ УдПЕЧи ШыРЧ ЛіБђАњ СњАЈ, ЕЮЕЯ ПЉКЮ ЕюРЛ ЦФОЧЧи АцПюЕШ АїАњ АцПюЕЧСі ОЪРК АїРЧ АцАшИІ АЫУтЧбДй. БзИЎАэ АЫУтЕШ АцАшСЄКИИІ НЩУўЧаНР(ЕіЗЏДз) БтМњЗЮ КаМЎЧи ЦЎЗЂХЭРЧ СжЧрЙцЧтРЛ СІОюЧЯИч СїСјСжЧрАњ МБШИЧЯДТ ЙцНФРИЗЮ ЦЎЗЂХЭ РкРВСжЧрРЛ НЧЧшЧб АсАњ, РлОїМгЕЕ 3ЇА/h НУ СїСј СжЧрАцЗЮ ПРТїДТ ±9.5ЇЏ РЬГЛЗЮ, ПюРќРк СжЧр НУРЧ ПРТї ±21.2ЇЏКИДй ГЗРК АсАњЗЮ ГЊХИГЕДй. РЬДТ ПЕЛѓРхФЁИИРИЗЮ АцЗЮУпСОРЛ Чв Мі РжРЛ Лг ОЦДЯЖѓ РхОжЙА РЮНФЕЕ АЁДЩЧи ЧЯГЊРЧ ДмРЯМОМЗЮ КЙЧеРћРЮ РгЙЋИІ МіЧрЧв Мі РжОю Л§Лъ ДмАЁИІ ГЗУт Мі РжДйДТ РхСЁРЬ РжДй.
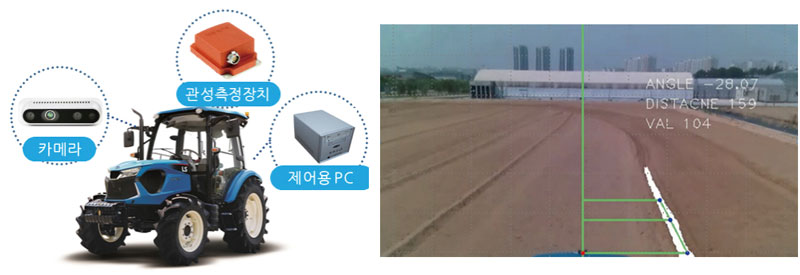 |
| РкРВСжЧр ЦЎЗЂХЭРЧ РЮАјСіДЩ БтЙн СЖЧтАЂ АшЛъ |
2020ГтПЁДТ ДйУЄГЮ ЗЙРЬРњМОМРЮ LiDARИІ ШАПыЧЯПЉ 3ТїПј АјАЃЛѓРЧ АњМі РЇФЁ Йз ЧќЛѓРЛ РЮНФЧи АњМіПЁИИ ГѓОрРЛ ЛьЦїЧв Мі РжДТ ‘СіДЩЧќ ЗЮКП ЙцСІБт’ИІ АГЙпЧпДй. ПјИЎДТ АњМіПјПЁМ КДЧиУц ЙцСІИІ ИёРћРИЗЮ ЛчПыЧЯАэ РжДТ БтСИРЧ SSБт(speed sprayer)РЧ КаЛчБИПЁ РќРкНФ МжЗЙГыРЬЕх ЙыКъИІ РхТјЧи LiDARИІ ХыЧи РЮНФЕШ АњМіПЁИИ ГѓОрРЛ ЛьЦїЧв Мі РжЕЕЗЯ КаЛчБИКА АГЦѓСІОюИІ ЧЯДТ ЙцНФРИЗЮ, БтСИ SSБт ДыКё ГѓОрЛьЦїЗЎРЛ 20~40%БюСі Р§АЈЧв Мі РжРИИч, РЬ ЙцСІБтДТ АэСЄЙа GNSS БтЙн БЫЕЕЧќ СжЧрЧУЗЇЦћПЁ ХОРчЕХ ЛчРќПЁ МГСЄЧи Еа АњМіПј ГЛ АцЗЮИІ ЕћЖѓ РкРВСжЧрЧЯИщМ ЙЋРЮЙцСІИІ МіЧрЧбДй. СіДЩЧќ ЗЮКПЙцСІБтИІ ЛчПыЧи ЙцСІЧв АцПь, ГѓОрР§АЈЗќ 30% БтСиРИЗЮ УпЛъЧиКИИщ Уб АњМіПј ДыЛѓ ПЌАЃ 1980ОяПјРЧ Л§ЛъКёПы Р§АЈРК ЙАЗа ГѓОрРЧ ХфОчРЏРд ЕюРИЗЮ РЮЧб ШЏАц Йз ЛчШИРћ КИЛѓКёПы Ор 639ОяПј Ею ПЌАЃ 2619ОяПјРЧ КёПыРЬ Р§АЈЕЩ АЭРИЗЮ ПЙЛѓЕШДй.
Бз ЙлПЁ АњМіПјПы СІУЪЗЮКПАњ РлОїРк УпСО ПюЙнЗЮКП, РкЕП ОрОзУцРќ ЕюРЧ БтДЩРЛ УпАЁЧб СіДЩЧќ ЙцСІЗЮКП БтМњАэЕЕШ, РЮАјСіДЩ Йз ПЕЛѓБтЙнРЧ ЛчАњ МіШЎЗЮКП БтМњ ЕюРЧ УЗДмГѓБтАш АќЗУ ПЌБИАЁ СјЧрЕЧАэ РжДй.
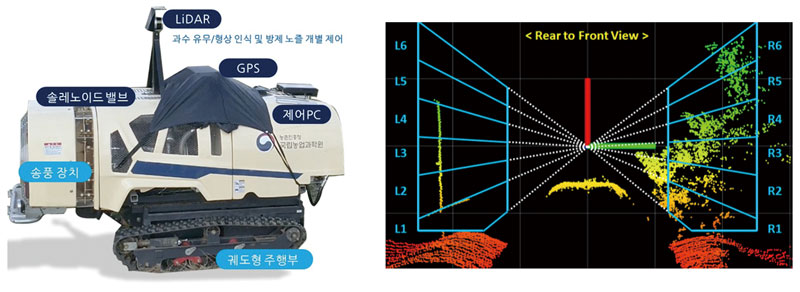 |
| НКИЖЦЎ ЗЮКП ЙцСІБтРЧ LiDAR МОМ ШАПы АњМі РЮНФ |
ЂКНУЛчСЁ Йз СІО№
РЬЗИАд АГЙпЕШ УЗДмГѓБтАшАЁ ПЌБИАГЙпПЁИИ БзФЃДйИщ ОЦЙЋ РЧЙЬАЁ ОјРЛ АЭРЬДй. РЬИІ ЛѓПыШЧи ГѓАЁПЁ КИБоЧЯДТ АЭЕЕ СпПфЧбЕЅ, УЗДмГѓБтАшПЁ ДыЧб ГѓЙЮЕщРЧ РЮНФ Йз АќНЩКЮСЗ, КёНб БИИХКёПы, РЮЧСЖѓ Йз МГКёРЧ КЮРч ЕюРИЗЮ РЮЧи КИБоЧЯБтСЖТї НБСі ОЪРК АЭРЬ ЧіНЧРЬДй. ЦЏШї УЗДмГѓБтАшИІ СІРл, ЦЧИХЧв ОїУМЕщРЧ М§РкЕЕ РћРК ЕЅДйАЁ ГѓРлОї ЦЏМКЛѓ Бз МіПфАЁ РћОю МБЖц ОїУМЕщЕЕ УЗДмГѓБтАшИІ СІРл, ЦЧИХЧв ОіЕЮИІ Иј ГЛДТ НЧСЄРЬДй. АдДйАЁ УЗДмБтМњРЛ РћПыЧЯБт РЇЧиМДТ АГЙпРЮЗТРЧ ШЎКИЕЕ СпПфЧбЕЅ РЬИІ УцПјЧв ПЉЗТ ЖЧЧб ИЙСі ОЪДйДТ АЭЕЕ ЧіНЧРћРЮ ЙЎСІ Сп ЧЯГЊРЬДй.
РЬИІ ЧиМвЧЯБт РЇЧб ЧЯГЊРЧ ЙцЦэРИЗЮ, КИБо УЪБтПЁДТ ЛчПы СжУМРЮ ГѓЙЮЕщРЛ МіПфДыЛѓРИЗЮ ЧЯБтКИДйДТ АЂ ЕЕ ГѓОїБтМњПјРЬГЊ НУБК МОХЭ, ГѓЧљ ЕюРЛ ХыЧб РгДы ЖЧДТ КИБоЛчОїРЛ УпСјЧи УЗДмГѓБтАш СІСЖЛчАЁ УжМвЧбРЧ АјБоЙАЗЎРЛ ШЎКИЧв Мі РжЕЕЗЯ ЧиСй ЧЪПфАЁ РжДй. РЬДТ МіПфАЁ РћРК ИИХ МБМјШЏРћ КИБоБИСЖИІ ХыЧи ГѓЙЮЕЕ КЮДу ОјРЬ УЗДмГѓБтАшИІ СЂЧиКМ Мі РжАд ЧдРИЗЮНс НХБтМњПЁ ДыЧб РЮНФРќШЏРЧ АшБтИІ ИЖЗУЧи Сй Мі РжРЛ АЭРЬДй.
РЬЗИАд БтУЪ РЮЧСЖѓ БИУр, УЗДмГѓБтАш СІСЖОїУМ ШАМКШ Йз ГѓОїАњ ЗЮКПБтМњРЛ АсЧеЧб РќЕПШ, ЙЋРЮШЕШ УЗДмГѓБтАшИІ БтЙнРИЗЮ ЧбБЙЧќ ЙЬЗЁГѓОї И№ЕЈРЛ СІНУЧбДйИщ, РЮАЃАњ УЗДмГѓБтАшРЧ ЧљОїРЛ ХыЧи ЛѕЗЮПю НУДыРЧ ШхИЇПЁМ ЧбБЙЧќ УЗДмГѓБтАш БтМњРЧ ЙЬЗЁ КёРќАњ ЧйНЩБтМњЗЮНс ШЎНЧЧб РкИЎИХБшРЛ Чв Мі РжРЛ АЭРЬДй.
ГѓУрЛъБтАшНХЙЎ webmaster@alnews.co.kr
<РњРлБЧРк © ГѓУрЛъБтАшНХЙЎ, ЙЋДм РќРч Йз РчЙшЦї БнСі>





